- トップ
- 科学技術・大学ニュース
- 記事詳細
[ 科学技術・大学 ]
東北大、数珠状部品の新機構開発 柔軟・固定の状態を簡単切り替え(動画あり)
(2017/12/25 05:00)
-

複雑形状に固定化した状態(東北大提供)
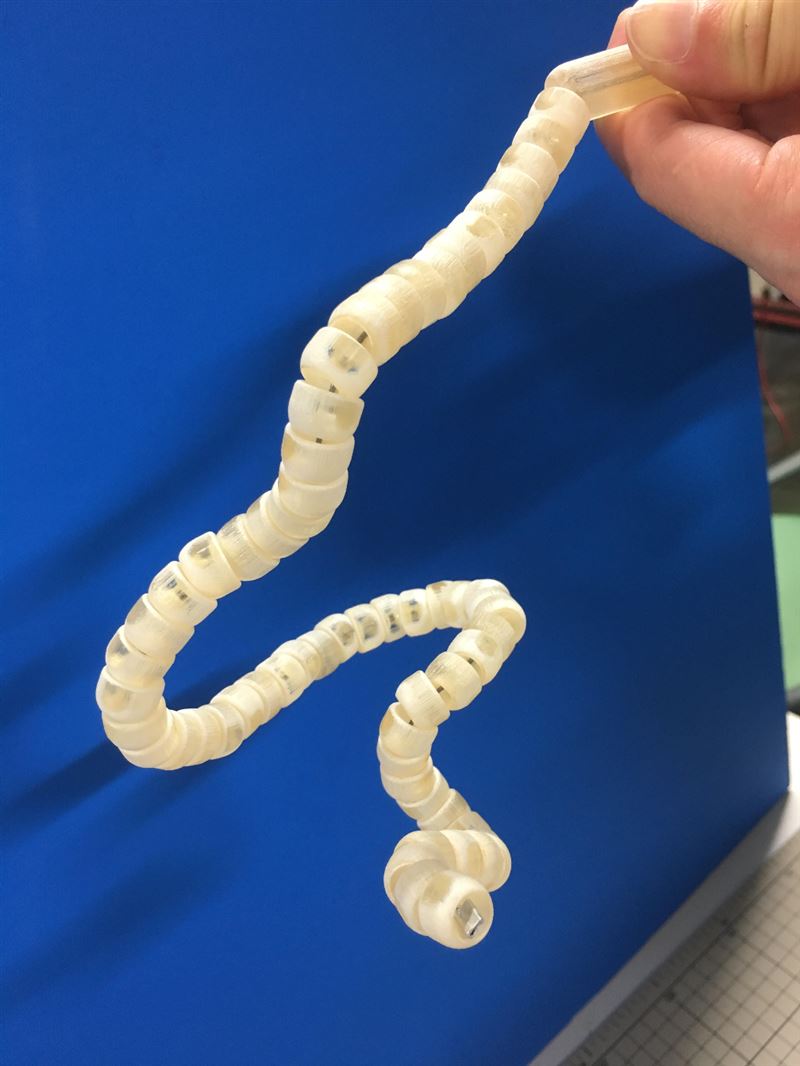

東北大学大学院情報科学研究科の多田隈建二郎准教授らは、「柔軟な状態」と「固定された状態」を簡単に切り替える数珠状の部品を使う「一次元ジャミング転移」という機構を開発した。ワイヤでおわん型の玉を数珠のようにつなぎ、ワイヤを引いて締め固める。柔軟な状態で対象の形に合わせて巻き付け、締め固めてから対象を引き抜くなどの用途を提案する。内視鏡やロボットハンドへの応用を目指す。
数珠の片側をとめて中心のひもを引っ張ると、玉同士が密着してその摩擦で数珠全体が堅く固定化される現象を利用した。
ただ、数珠玉のように球状の玉では、真っすぐ一直線の形になってしまう。そのため、今回はおわん型の玉を連ねた。玉同士がはまり合い、強い摩擦力が得られる。これにより、ワイヤをひいた瞬間の形を残したまま固まることができる。
直径12ミリメートルのおわん玉で長さ50センチメートルの数珠ひもを作成した。引き締める前は柔らかなひものように扱え、引き締めるとその時の形に固まった。
袋に粉体を充填して吸引し締め固める方法では、大気圧以上の締め固めが難しかった。ワイヤならモーターで巻き取り強力に締め固められる。
現在は基本原理を実証した段階。形状や玉の表面性状などと、摩擦力や固定力を検証する。中空構造を工夫することで、ひもの中の特定の場所だけ締め固めることも可能。内視鏡の一部だけ固めて、そこを起点に力をかけるなどの作業が可能になる。
機構を小型化して大量に並べたロボットハンドへの応用を進める。対象の形状を選ばずにつかめるようになる。3年程度での実用化を目指す。
(2017/12/25 05:00)