[ ロボット ]

(2017/8/4 05:00)
物流ロボ 実力と課題-アイテム認識の目 着々と進化
米アマゾン・ドット・コムグループが主催する「アマゾン・ロボティクス・チャレンジ(ARC)=用語参照」が7月末に日本で開かれ、物流作業で自動化が難しいピッキングのロボット技術を競った。ピッキングは箱から任意の商品や製品(アイテム)を取り出し、行き先別に仕分ける作業。回を重ねるごとに参加チームの技術は向上している。競技から見えたロボット技術の今と課題はどんなものか。(石橋弘彰)
【至難の業】
現在のロボットは、人間と同じように何でもできるわけではない。同じアイテムばかりを繰り返して取り出すことはロボットでも簡単だ。だがARCの競技のように、トイレ洗浄ブラシやラップの箱、ペットボトル、ノート、金属メッシュのペン立てなど雑多なアイテムを一つずつ的確につかむことは難しい。しかも多くアイテムが一緒に入った箱から任意のアイテムを取り出すのは至難の業だ。
-

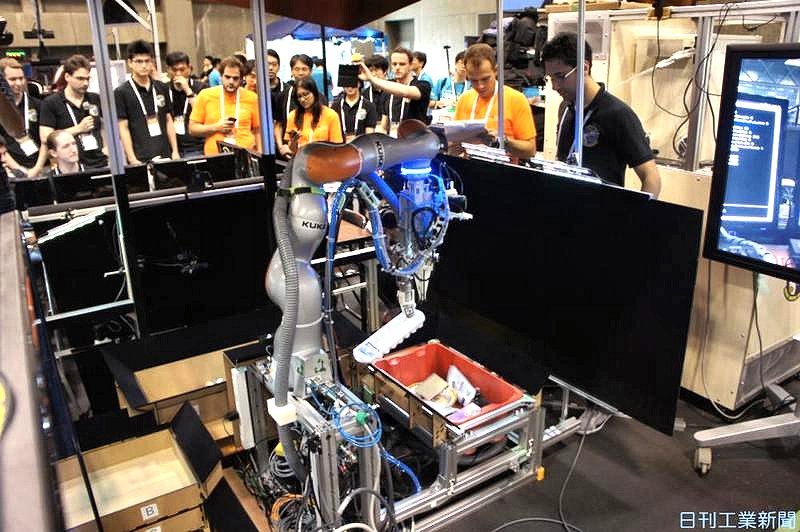
NAISTパナソニックのロボットはシステムトラブルに悩まされた

ARCはピッキング作業のロボット化がテーマ。参加チームが最新技術やユニークなアイデアで競うことで、ピッキングのレベルも飛躍的に高まった。
まずは、ロボットの手に当たるエンドエフェクター。かつては人間の手を模すなどメカ的なエンドが多かったが、掃除機のように吸い込んでつかむ吸着が主流になった。吸着できないメッシュ状のアイテムなどはグリッパで挟んでつかむ。中にはインドの「IITK―TCS」やシンガポール南洋理工大学の「Nyanyang」のように吸着だけで勝負するチームもあった。
ユニークな機構で挑戦するチームもありドイツのカールスルーエ工科大学の「IFL PiRO」は吸着機構の脇に指となる部分が出てきてグリッパになる仕組みを使った。台湾の淡江大学の「TKU M―Bot」は3本指のグリッパと吸着をそれぞれにつけた2本の腕を自作した。チームの学生は「丸いものをしっかりつかむことを狙った」という。
-

トロフィーを受け取るACRVチーム

画像認識は、人工知能(AI)技術のディープラーニング(深層学習)によって精度を高めることが“常識”になった。米NVIDIAでIoT(モノのインターネット)事業を担うムラーリ・ゴパラクリシュナ統括部長は「さまざまなアイテムの画像を深層学習で学び、しっかり位置を把握してどこをつかめば落とさないか、といったことを判断する技術が当たり前になった」と説明する。加えて、今回は競技直前に追加のアイテムをチームに知らせてアドリブ的な対応力も試した。「未知のアイテムを短時間で深層学習で学ぶ技術も各チームが仕上げている」という。
ただ、高度な画像認識技術を使うとロボットを制御するソフトウエアなど全体の調整が難しくなり、どう設計するかが課題となる。
【トラブル続出】
今回、高度な技術で挑んだ三菱電機、中部大学、中京大学の「MC2」やパナソニック、奈良先端科学技術大学院大学の「NAISTパナソニック」は、トラブルが重なり力を発揮できなかった。
-

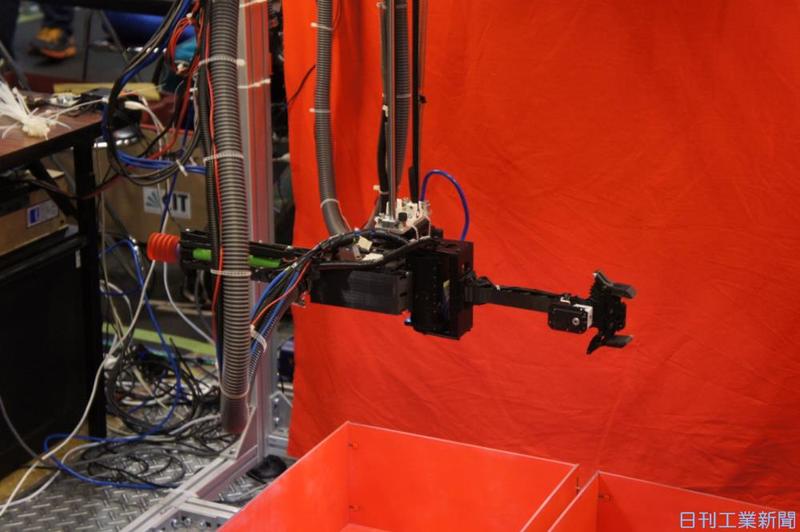
ACRVのロボットのエンド部吸着とグリッパが回転して入れ替わる
一方、最終ラウンドで優勝した豪クイーンズランド工科大学などの「ACRV」はUFOキャッチャーのような3軸の移動に動きを絞り込み奏功した。同チームのユーゲン・ライザー博士によると、前回は米リシンク・ロボティクスの双腕ロボット「バクスター」を採用したが制御が難しく、今回はシンプルなロボットを自作した。
ピックタスクで1位になった南洋理工大学も3台の3次元カメラで物体を認識していた。20個以上のカメラや触覚センサーを使った米マサチューセッツ工科大学(MIT)などのチームも多くある中、シンプルな構成と「こなれた」技術で力を発揮した。MC2で参加した三菱電機先端技術総合研究所の堂前幸康主席研究員は「要素技術が最新でなくても、システムの全体設計が上手なチームが上位に入った」と大会を振り返る。
【共通課題】
ARCで披露された新技術は、早々にロボット研究者全体が共有する。前回大会で上位に入ったプリファード・ネットワークス(PFN、東京都千代田区)の松元叡一リサーチャーは「今回は多くのチームがリアルタイム画像認識ソフト『Yolo(ヨロ)』を使うなど、良い技術を採り入れる動きが速い」と感心する。
一方で、できなかった課題も共有して克服するため、ピッキング作業に関するロボット研究自体の底上げが早まっている。「チームK」として参加した東京大学の岡田慧准教授は「アマゾンは研究開発のターゲットをうまい形で示し、全体の共通課題にした」と解説する。これまでのロボット研究は「不整地を歩く」「コップを持つ」などテーマがバラバラだったが、より社会に役立ち、技術の容易な課題ができたことで、研究開発の好循環ができている。
-

吸着が難しいアイテムはグリッパでつかむ(MITなどのチーム)

では、ピッキング作業のロボット化が実現するのはいつか。
大会では、全てのアイテムを的確につかむことはまだできていない。技術的な課題は今後も山積しているように見える。アマゾン・ロボティクスのジョーイ・ダラム研究先進開発責任者は「まだ数年はピッキングは課題として残る」と予測する。ベス・マーカス同社シニアプリンシパルテクノロジストは「まずは人と連携して、生産性を高め人の負担を減らすことになる」と見ており、そうした仕組みは早い時期に出てきてもおかしくないようだ。
【用語】アマゾン・ロボティクス・チャレンジ=ロボットアームを使って箱から不定形物を取り出すピッキング作業の技術を競う国際大会で今回が3回目。過去2回はアマゾン・ピッキング・チャレンジという名称だった。今回は箱に入ったアイテムを取り出して棚に入れる「ストウタスク」、棚から任意のアイテムを探し出して指示された箱に詰める「ピックタスク」の技術を競った。両タスクの合計点上位8チームが最終ラウンドに進み、両タスクを連続して行い優勝を争った。賞金はストウ、ピックの各1位が2万ドル(約220万円)、最終ラウンド優勝で8万ドル(約880万円)。
(2017/8/4 05:00)






































